황보제민 교수팀, 고속 내비게이션 프레임워크 개발
불연속적 지형에서 최대 초당 4m 보행 가능 입증해
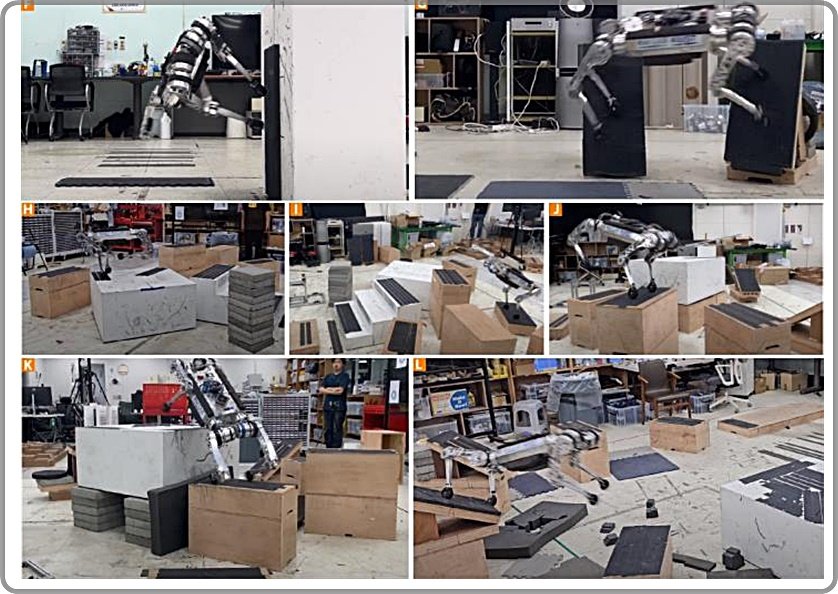
한국과학기술원(KAIST·카이스트)이 개발한 사족보행 로봇 ‘라이보(Raibo)’가 계단이나 틈, 벽, 잔해 같은 복잡한 지형에서 고속으로 이동할 수 있게 됐다.
라이보는 재난현장 탐색이나 산악수색 등 악조건 속에서 사람을 대신해 임무수행이 가능해졌다.
카이스트는 기계공학과 황보제민 교수팀이 벽, 계단, 징검다리 등 불연속적이고 복잡한 지형에서도 시속 14.4㎞(4㎧)의 고속보행이 가능한 사족 보행로봇 내비게이션 프레임워크를 개발했다고 3일 밝혔다.
플래너 모듈은 신경망 기반 휴리스틱을 활용한 샘플링 기반 최적화 방식을 통해 물리적으로 가능한 발 디딤위치를 빠르게 탐색하고 시뮬레이션 롤아웃으로 최적 경로를 검증한다.
기존 방식들이 발 디딤위치 외에도 접촉시점, 로봇자세 등 다양한 요소를 함께 고려한 반면 이번 연구에서는 발 디딤위치만을 탐색공간으로 설정해 계산 복잡도를 크게 낮췄다.
특히 고양이 보행방식에서 착안해 앞발이 밟았던 곳을 뒷발이 디디는 구조를 도입, 계산 복잡도를 크게 줄였다.
트래커는 로봇이 계획된 위치에 정확하게 발을 디딜 수 있도록 강화학습을 통해 학습되며 맵 생성기(map generator)모델이 목표 분포를 제공한다.
이 생성 모델과 트래커는 경쟁적으로 동시학습이 이뤄져 점진적으로 어려운 난이도에 적응할 수 있도록 설계됐다.
해당 기술은 카이스트가 자체 개발 로봇 ‘라이보(Raibo)’에 탑재돼 ▲수직 벽 달리기 ▲1.3m 폭 점프 ▲징검다리 위 4㎧ 주행 ▲경사·계단·장애물 복합지형 자율주행 등을 성공적으로 수행해 현저한 기동성과 안정성을 입증했다.
이번 연구 성과는 국제 학술지 사이언스 로보틱스(Science Robotics)에 지난달 게재됐다.(논문명:High- speed control and navigation for quadrupedal robots on complex and discrete terrain)
[대전=뉴시스]
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개
![‘수박 몰이’에 갇힌 민주당의 개혁 무리수 [오늘과 내일/문병기]](https://dimg.donga.com/a/464/260/95/1/wps/NEWS/FEED/Donga_Home_News/132433509.1.thumb.jpg)


댓글 0