공유하기
위로보틱스, 한국형 휴머노이드 로봇 ‘알렉스’ 상반신 공개
- 동아경제
글자크기 설정
고자유도 로봇과 저마찰 팔 기술 도입
서비스·제조·가사 분야 활용 기대↑

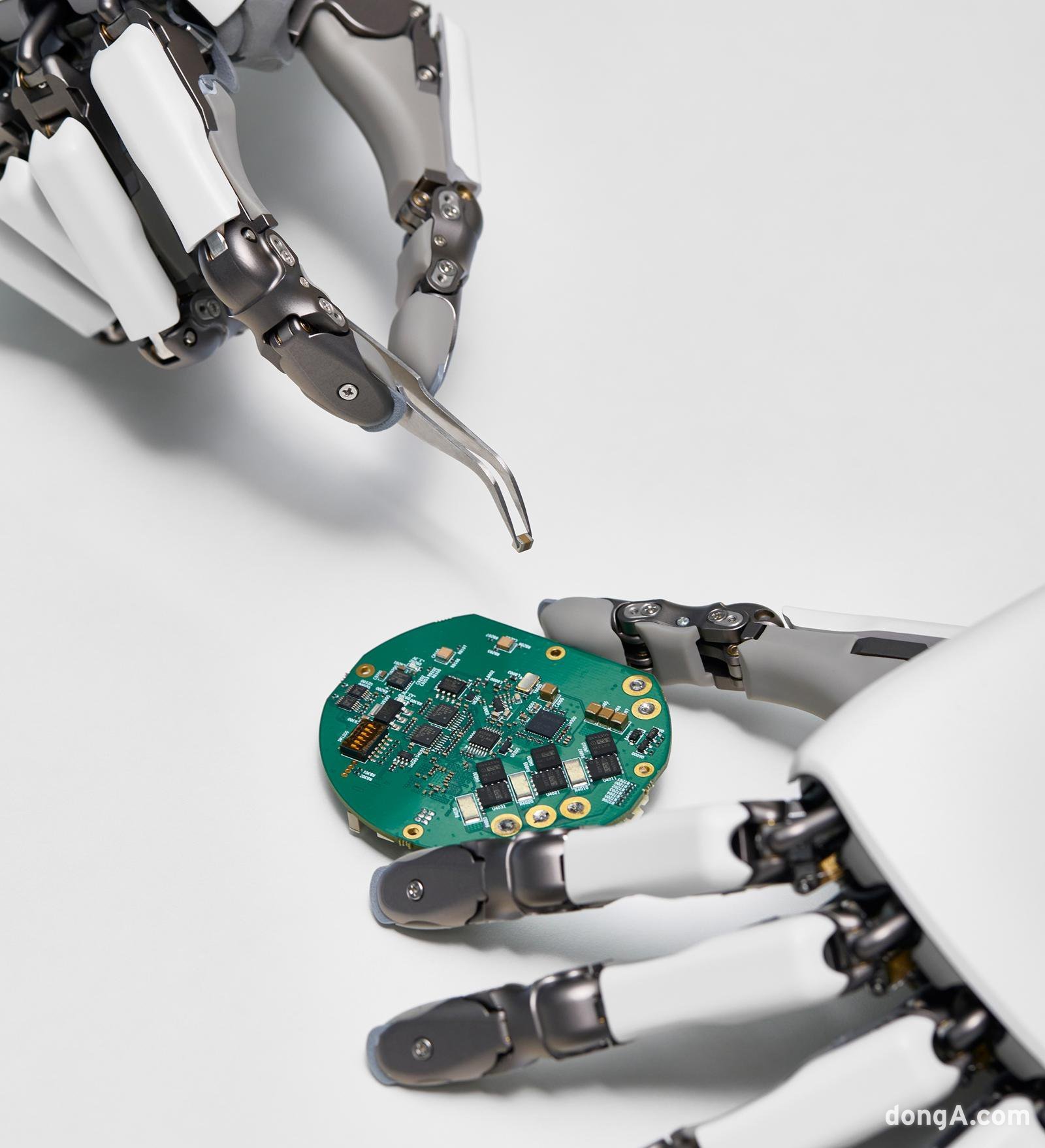
위로보틱스는 18일 한국기술교육대학교 제1캠퍼스 내 로봇 이노베이션 허브(RIH)에서 첫 번째 범용 휴머노이드 로봇 ‘ALLEX(알렉스)’의 상반신을 공개했다고 밝혔다.
ALLEX는 ‘ALL-EXperience(모든 경험)’의 약자로, 시각인식과 위치제어를 넘어 힘, 접촉, 충격 등 물리적 자극에 반응하며 실제 환경과 상호작용하는 로봇이다. 사람과 유사한 인터랙션(상호작용) 능력을 통해 기존 로봇의 한계를 넘어서는 새로운 휴머노이드 기준을 제시한다는 방침이다.
ALLEX는 위로보틱스의 독자적 메커니즘(기계적 구조)과 제어 기술로 개발됐다. 주요 구성은 사람처럼 역감(외부 힘에 대한 반응 감각)을 느끼며 외력에 순응하는 고자유도(다양한 방향으로 자유롭게 움직일 수 있는) 로봇 손, 기존 협동로봇팔 대비 10배 낮은 마찰력(움직임 저항)과 회전관성(회전 시 저항력)으로 높은 역구동성(외부 힘에 따라 자연스럽게 움직이는 능력)을 지닌 로봇 팔, 중력보상 메커니즘(중력 영향을 줄이는 구조)이 적용된 상체다. 이를 통해 서비스, 제조, 가사 등 인간 협업이 필요한 분야에서의 활용 가능성을 확대했다고 한다.

또한 손 700g, 어깨 이하 5kg의 경량 구조로 기민하고 안전한 동작이 가능하다. 전 가동 범위에서 한 손으로 3kg 이상을 다룰 수 있으며, 이는 중형 협동 로봇(자중 20kg 이상) 수준의 작업 능력(기반 하중, 운반 가능한 무게)이라고 한다.
김용재 위로보틱스 공동대표는 “ALLEX는 인간 움직임을 정밀히 모사하며 실제 세계를 경험하고 반응하는 최초의 로봇이다. 2년 전 웨어러블 로봇 기술에 이어, 2030년까지 일상에서 활용 가능한 범용 휴머노이드 플랫폼을 구현해 정밀함과 유연함이 공존하는 로봇 시대를 열겠다”라고 밝혔다.
© dongA.com All rights reserved. 무단 전재, 재배포 및 AI학습 이용 금지
트렌드뉴스
-
1
[단독]점유율 뚝-계약 줄취소…배터리도 구조조정 시사
-
2
기억력 저하로 흔들리는 노후…‘깜빡깜빡’할 때부터 관리해야
-
3
‘뱃살 쏘옥’ 빼는 과학적으로 입증된 유일한 방법은?
-
4
[단독]“물건 보냈는데 돈 안와”… 국제정세 불안에 수출대금 8000억 떼일 위기
-
5
“살려주세요, 여기있어요” 5m 아래 배수로서 들린 목소리
-
6
‘소재 불명’ 경남 미취학 아동, 베트남서 찾았다…알고보니
-
7
정동영, 北에 ‘무인기 사과’ 시사에…위성락 “사실 파악이 먼저”
-
8
“정치살인” “尹사형 구형에 한동훈 죽어”…여권, ‘韓제명’ 국힘 비판
-
9
서울 버스, 오늘 첫차부터 정상운행…노사 협상타결
-
10
[송평인 칼럼]군 통수권자의 최소한의 자격
-
1
정동영, 北에 ‘무인기 사과’ 시사에…위성락 “사실 파악이 먼저”
-
2
한동훈 “허위조작 제명은 또다른 계엄…장동혁, 날 찍어내려는 것”
-
3
“정치살인” “尹사형 구형에 한동훈 죽어”…여권, ‘韓제명’ 국힘 비판
-
4
[단독]특검, 보안 유지하려 ‘사형-무기징역’ 논고문 2개 써놨다
-
5
한동훈, 재심 대신 ‘징계 효력정지’ 법적 대응…“절차 위법 심각”
-
6
특검 “尹, 권력욕 위해 계엄… 전두환보다 더 엄정 단죄해야”
-
7
차 창문 내리자 또 다가와 손잡아…다카이치 ‘극진한 환송’
-
8
[속보]한동훈 “윤리위 제명 결정, 또다른 계엄 선포…반드시 막을 것”
-
9
국힘 윤리위, 한동훈 제명 결정…장동혁호 ‘뺄셈 정치’ 가나
-
10
[단독]김경 “1억원 줄때, 강선우도 함께 있었다” 자수서
트렌드뉴스
-
1
[단독]점유율 뚝-계약 줄취소…배터리도 구조조정 시사
-
2
기억력 저하로 흔들리는 노후…‘깜빡깜빡’할 때부터 관리해야
-
3
‘뱃살 쏘옥’ 빼는 과학적으로 입증된 유일한 방법은?
-
4
[단독]“물건 보냈는데 돈 안와”… 국제정세 불안에 수출대금 8000억 떼일 위기
-
5
“살려주세요, 여기있어요” 5m 아래 배수로서 들린 목소리
-
6
‘소재 불명’ 경남 미취학 아동, 베트남서 찾았다…알고보니
-
7
정동영, 北에 ‘무인기 사과’ 시사에…위성락 “사실 파악이 먼저”
-
8
“정치살인” “尹사형 구형에 한동훈 죽어”…여권, ‘韓제명’ 국힘 비판
-
9
서울 버스, 오늘 첫차부터 정상운행…노사 협상타결
-
10
[송평인 칼럼]군 통수권자의 최소한의 자격
-
1
정동영, 北에 ‘무인기 사과’ 시사에…위성락 “사실 파악이 먼저”
-
2
한동훈 “허위조작 제명은 또다른 계엄…장동혁, 날 찍어내려는 것”
-
3
“정치살인” “尹사형 구형에 한동훈 죽어”…여권, ‘韓제명’ 국힘 비판
-
4
[단독]특검, 보안 유지하려 ‘사형-무기징역’ 논고문 2개 써놨다
-
5
한동훈, 재심 대신 ‘징계 효력정지’ 법적 대응…“절차 위법 심각”
-
6
특검 “尹, 권력욕 위해 계엄… 전두환보다 더 엄정 단죄해야”
-
7
차 창문 내리자 또 다가와 손잡아…다카이치 ‘극진한 환송’
-
8
[속보]한동훈 “윤리위 제명 결정, 또다른 계엄 선포…반드시 막을 것”
-
9
국힘 윤리위, 한동훈 제명 결정…장동혁호 ‘뺄셈 정치’ 가나
-
10
[단독]김경 “1억원 줄때, 강선우도 함께 있었다” 자수서
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0